С тезисом о том, что мастерство вождения автомобилей по улицам городов достигнет теоретических и практических пределов при использовании роботизированных систем-автопилотов, вряд ли найдутся желающие поспорить. Очевидно, что высокий профессионализм робота-автоводителя, его способности не отвлекаться от выполнения заложенных в памяти бортового компьютера функций, не уставать, не раздражаться, безусловно, будут способствовать повышению безопасности всех участников дорожного движения, однако все указанные положительные черты робомобиля, по мнению экспертов Бостонской консалтинговой группы, не смогут обеспечить снижение вероятности возникновения в городе автопробок.
Более того, по расчетам, проведенным в этой авторитетной организации, рост в течение десятилетия количества «беспилотников» (как индивидуального пользования, так и такси) отразится на повышении вероятности автопробок и удлинении времени, необходимого для прибытия в конечный пункт поездки (например, из дома в офис), по сравнению с сегодняшними показателями примерно на 5,5%.
Выходом из этой патовой ситуации может стать использование технологии беспроводной телекоммуникации робомобилями «всех со всеми», которая была анонсирована около пяти лет назад Национальной администрацией безопасности движения на автодорогах США (National Highway Traffic Safety Administration — NHTSA). За прошедшее время эта технология, названная Vehicle-to-Vehicle (V2V), прошла испытания на тысячах автомобилей, которые были проведены Институтом транспортных исследований Мичиганского университета и многими организациями, работающими в сфере разработки и внедрения систем безопасного движения автомобилей. Пока что технология V2V тестируется в автомобилях, управляемых человеком, но в будущем она может быть совмещена с робототехнической системой автовождения.
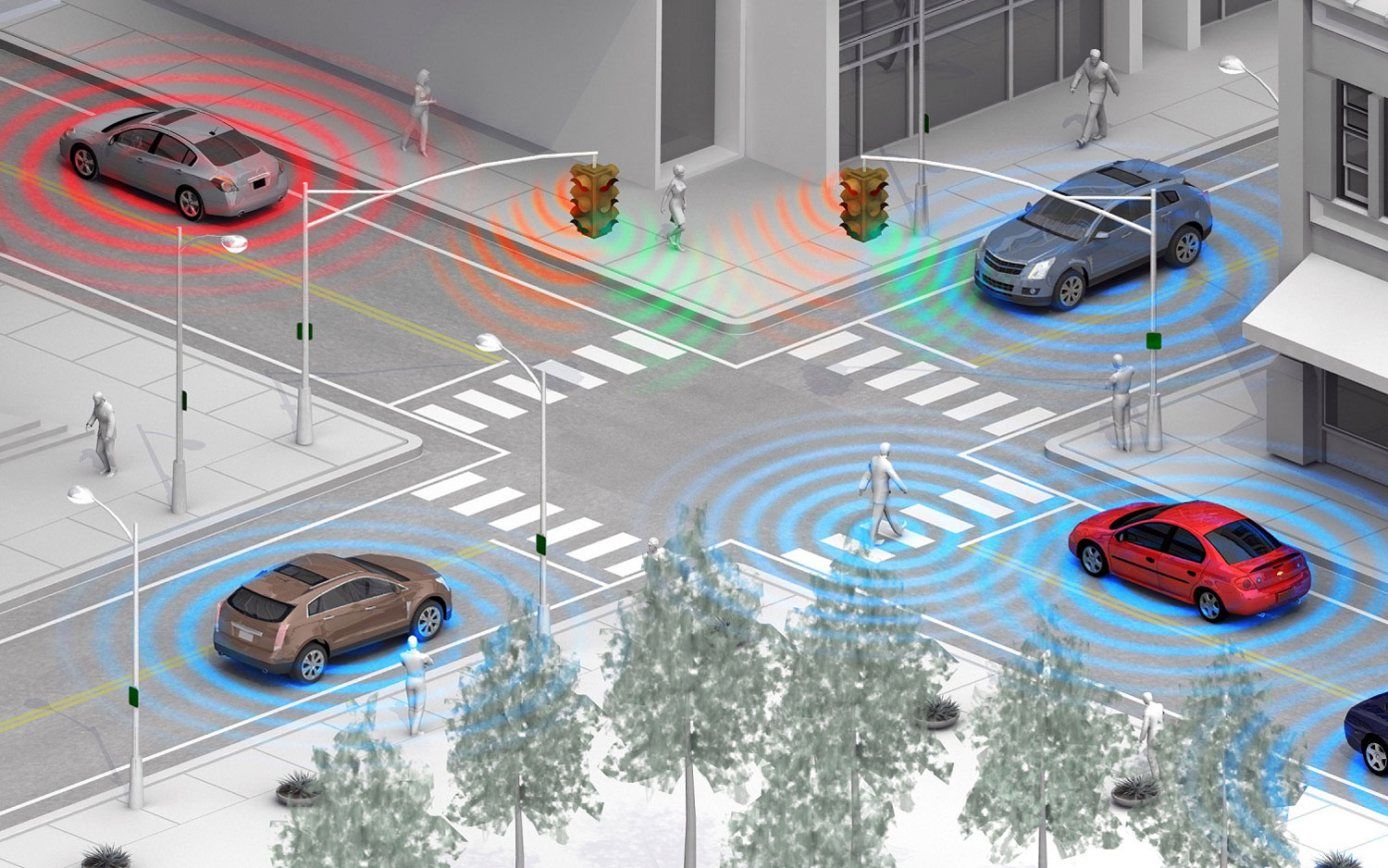
Одно из «ответвлений» технологии V2V — регулирующие движение на городских перекрестках виртуальные светофоры, «фонарики» которых размещаются в салонах автомобилей и включаются («красный», «желтый» или «зеленый») в соответствии со сложившейся в текущий момент времени дорожной обстановкой. А за этой обстановкой следят системы V2V, работающие в «подключенных» автомобилях. И когда автомобили приближаются к перекрестку по разным улицам, ПО «групповой системы V2V» определяет условно «главный» автомобиль, который будет контролировать ситуацию. На дисплее его бортового компьютера зажигается красный свет, а у «второстепенных» автомашин — зеленый. После того, как они проедут, зеленый зажигается в салоне у главной машины. Затем система V2V выбирает «главный» автомобиль среди следующей группы, подъезжающей к перекрестку.
V2V-система группового регулирования движения автомобилей через перекрестки разработана командой инженеров и программистов Университета Карнеги-Меллона, которая провела тестирование своей разработки на специально оборудованной площадке в Питтсбурге. Программа тестирования заключалась в том, что на первом этапе участники проекта ездили по маршруту, ориентируясь на сигналы обычного светофора, а затем проезжали по тому же пути под управлением находящихся в автомобилях виртуальных светофорах. По результатам многочисленных тестовых заездов были определены времена «простоев» автомобилей на перекрестках при использовании традиционных и виртуальных светофоров. И выяснилось, что виртуальные светофоры, установленные в автомобилях, позволяют сократить времена «простоев» не менее чем на 20%.
См. также:


